Jarvis Bot Hardware Flow
This document explains the hardware connections and workflow for the Jarvis Bot, which is designed for educational purposes. The bot integrates various hardware components, including sensors, power modules, a Raspberry Pi 4B, motors, and a motor driver, to achieve autonomous mobility. Below is a detailed description of each component and its role in the system, along with the connections flow.
Hardware Components and Connections
1. Raspberry Pi 4B
The Raspberry Pi 4B acts as the central controller of the Jarvis Bot. It processes sensor data, controls motor movement, and manages communication between various components. It connects to multiple hardware elements:
- Camera: Used for visual sensing and image processing.
- Motor Driver: Controls the movement of the left and right motors based on signals from the Raspberry Pi.
- LiDAR Sensor (via Data Converter Box): Provides distance measurements and object detection, which aids in navigation and obstacle avoidance.
- Power Distribution Module: The Raspberry Pi 4B receives stable power from the battery via the power distribution module.
2. Camera
The camera is connected directly to the Raspberry Pi 4B and is used for capturing images and videos for vision-based tasks such as object detection, tracking, and navigation.
3. LiDAR Sensor (via Data Converter Box)
The LiDAR sensor is used for distance measurement and environmental mapping. The data from the LiDAR sensor is sent to the Raspberry Pi through a Data Converter Box, which converts the sensor’s signals into a format that the Raspberry Pi can process. This is essential for real-time navigation and collision avoidance.
4. Battery
A rechargeable Li-ion battery powers the entire system. The battery connects to the Power Distribution Module, which then supplies the necessary voltage to the various components, including the Raspberry Pi 4B and motor driver.
5. Power Distribution Module
The power distribution module ensures that the correct voltage is supplied to each component from the battery. It plays a crucial role in maintaining system stability by regulating the power flow to the Raspberry Pi 4B and motor driver.
6. Motor Driver (L298N)
The L298N Motor Driver controls the left and right BO motors of the Jarvis Bot. It receives power from the power distribution module and control signals from the Raspberry Pi 4B. The motor driver enables bi-directional control of the motors, which allows the bot to move forward, backward, and turn left or right.
7. Left and Right BO Motors
The left and right BO Motors are responsible for moving the bot. They are connected to the motor driver, which controls their speed and direction based on the signals from the Raspberry Pi. These motors, along with the wheels, enable the bot to navigate the environment.
8. Caster Wheel
The caster wheel provides additional support and balance to the bot while allowing smooth turns and movement in multiple directions.
Hardware Workflow
The Jarvis Bot's hardware is designed to work in a coordinated manner to ensure smooth power distribution, accurate sensing, and precise control of movement. Below is a comprehensive breakdown of the hardware workflow:
1. Power Flow
Powering the various components of the Jarvis Bot is achieved through a well-organized system to ensure stability and efficiency during operation. The Li-ion Battery (11.1V, 2000mAh) serves as the primary power source.
-
Power Distribution: The battery is connected to a Power Distribution Module, which regulates and distributes the power to different components in the system. The Raspberry Pi 4B requires 5V power, which is supplied via a USB power connection. The L298N Motor Driver, designed to handle higher voltages, receives its power directly from the module.
-
Efficient Energy Management: The power distribution system ensures that there is no voltage fluctuation that could disrupt the operation of sensitive components like the Raspberry Pi. This steady flow of power prevents system crashes, allowing for continuous operation without interruptions.
Power Flow Summary:
- The Li-ion Battery powers the Power Distribution Module.
- The Power Distribution Module supplies power to the Raspberry Pi 4B and L298N Motor Driver.
- The Raspberry Pi 4B provides power to additional peripherals like the Camera and LiDAR via its USB ports.
2. Sensing
The Jarvis Bot integrates a suite of sensors to navigate and understand its environment. The two primary sensors are a LiDAR sensor and a Raspberry Pi Camera.
LiDAR Sensor
-
LiDAR (Light Detection and Ranging) is an advanced sensor used for mapping and detecting objects by emitting laser pulses and analyzing the reflected signals. This allows the Jarvis Bot to measure distances, identify obstacles, and create a 2D map of its surroundings in real time.
-
Data Conversion: The LiDAR Sensor connects to a Data Converter Box, which translates the raw data from the sensor into a format that the Raspberry Pi can process. Once this data is available, the bot uses it for obstacle avoidance, ensuring that it moves safely through its environment.
Raspberry Pi Camera
-
The Raspberry Pi Camera is used for visual processing tasks such as object recognition, tracking, and navigation. It captures high-quality video or images in real time, allowing the robot to "see" and respond to visual stimuli. The camera data is processed by the Raspberry Pi for various applications like detecting objects, mapping landmarks, or assisting in visual navigation.
Sensing Flow Summary:
- The LiDAR Sensor sends data to the Data Converter Box, which converts it for processing by the Raspberry Pi 4B.
- The Raspberry Pi Camera captures visual data and sends it to the Raspberry Pi 4B for image processing and object detection.
3. Motor Control
Once the Raspberry Pi 4B processes data from the sensors, it must act on this information to control the movement of the Jarvis Bot. This is achieved through motor control.
-
Motor Driver (L298N): The Raspberry Pi 4B sends control signals to the L298N Motor Driver, which is responsible for controlling the direction and speed of the Left and Right BO Motors. The motor driver translates the control signals from the Raspberry Pi into voltage and current that powers the motors, allowing the bot to move forward, backward, or turn.
-
BO Motors: The BO Motors are DC motors connected to the Motor Driver and attached to the wheels of the bot. Based on the signals received from the motor driver, the BO motors drive the wheels forward or backward, enabling the robot to maneuver through its environment. This configuration allows the Jarvis Bot to perform basic movements like moving straight, turning left or right, or stopping.
Motor Control Summary:
- The Raspberry Pi 4B processes the sensor data and sends motor control commands to the L298N Motor Driver.
- The Motor Driver powers the Left and Right BO Motors, which in turn drive the wheels of the Jarvis Bot.
Complete Workflow
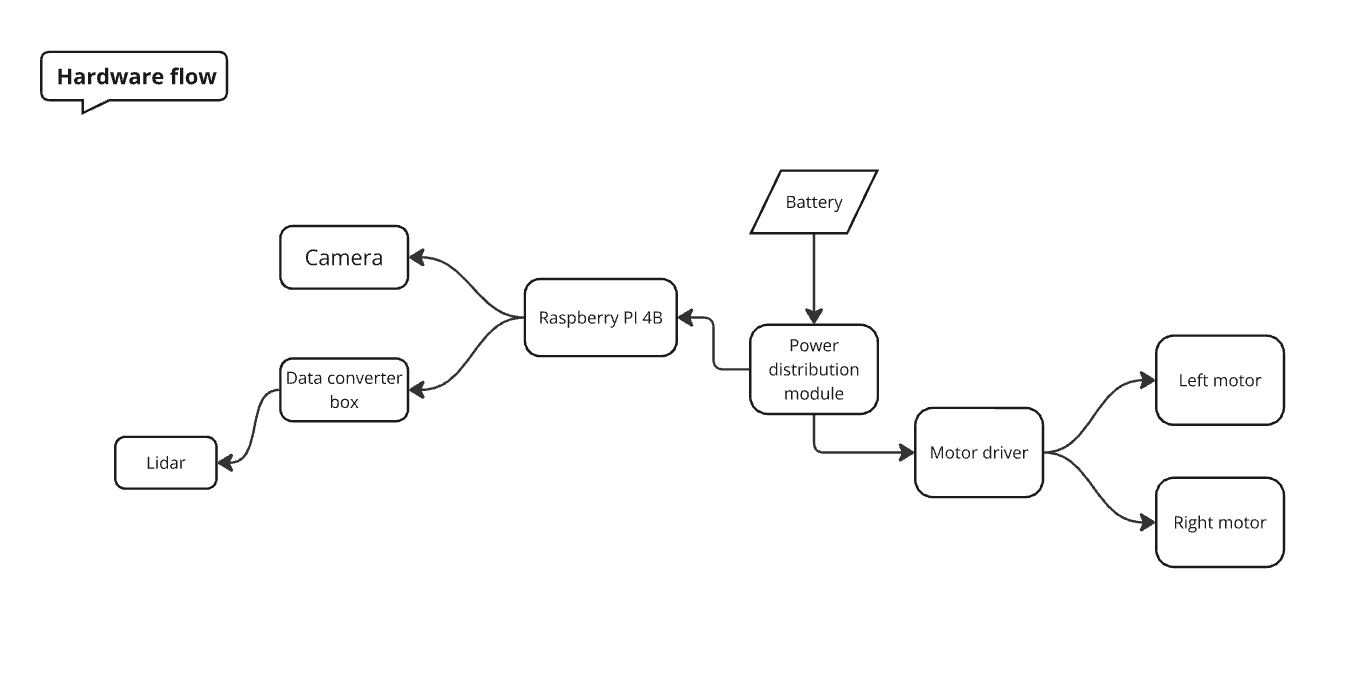
To summarize, the hardware components of the Jarvis Bot work together as follows:
- Power Flow: The Li-ion Battery provides power to the system through the Power Distribution Module, ensuring the Raspberry Pi 4B and Motor Driver are adequately powered.
- Sensing: The LiDAR Sensor and Raspberry Pi Camera capture environmental data, which is processed by the Raspberry Pi.
- Motor Control: Based on the processed data, the Raspberry Pi 4B sends commands to the Motor Driver, which controls the BO Motors to move the bot accordingly.
This workflow ensures that the Jarvis Bot can navigate, avoid obstacles, and perform tasks autonomously with precision and stability.
System Flow
- Power on: The Li-ion battery powers the Raspberry Pi and motor driver via the power distribution module.
- Data Collection: The LiDAR and Camera feed data into the Raspberry Pi.
- Processing: The Raspberry Pi processes the sensor data and makes decisions based on the inputs.
- Movement: The Raspberry Pi sends control signals to the motor driver, which adjusts the speed and direction of the BO motors, moving the bot accordingly.
- Navigation: The combined data from the LiDAR and Camera helps the bot navigate through its environment, avoid obstacles, and reach designated targets.
Conclusion
This hardware flow showcases the integrated system of the Jarvis Bot. By using a combination of sensor data, motor control, and power management, the bot can autonomously navigate and perform tasks. Each component plays a vital role in ensuring that the bot functions smoothly and efficiently.